


电缆线连接
发那科机器人系统之间有两种类型的电缆连接:系统内部的电缆连接和系统外部的电缆连接。
1. 系统中的电缆连接可分为三种类型:机器人本体与控制器、教员与控制器、电源与控制器。
2. 只有将这些电缆连接起来,才能实现机器人的基本运动。
系统周围的电缆连接主要是指机器人的身体和末端执行器,实现机器人的具体操作功能。
-
系统内部的电缆线连接
(1)机器人本体与控制器。
机器人本体与控制器之间的连接线有两根,这两根线连接控制器的一端已接好,而连接机器人的一端共用一个插口,如图2.17所示。

(2)示教器与控制器。
示教器电缆线为黑色线,一端已连接至控制器;将另一端接口对准示教器卡槽插入,并将其固定好,如图2.18所示。

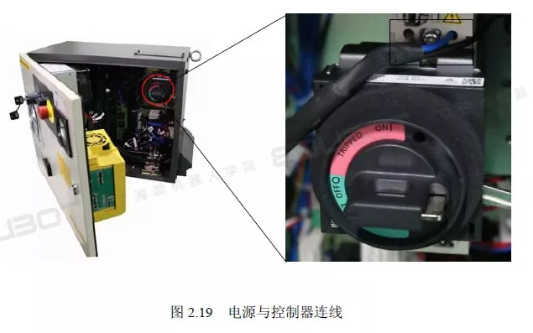
(3)电源与控制器。
将电源电缆线一端连接至控制器右上角断路器上端接口,如图2.19所示;另一端连接至220V/50Hz电源(通常采用10A电流)。注:电源电缆线是选配件,需要选购。
2.系统外围的电缆线连接
机器人本体与末端执行器(工具)之间的电缆线连接接口如图2.20所示。

EE接口:通过集成电路连接到控制器。
气源接口:通过集成气源接口将气体传送给气动元件。其中AIR1为直通气路;AIR2连接两个内部电磁阀,且1A和1B为一路,2A和2B为另一路。
***组装机器人
LRMate200iD/4S机器人的完整装箱如图2.21所示。

1.拆箱
通过专业的拆卸工具打开箱子,请确认装箱清单(标准配置),配件如图2.22所示。

2.机器人安装固定
机器人的安装对其功能的发挥十分重要,在实际工业生产中常见的有3种安装方式,如图2.23所示。

本书以***常用的第①种方式来讲解LRMate200iD/4S机器人的安装固定方法及其相关应用,其他安装方法可参阅FANUC相关手册。与LRMate200iD/4S机器人安装相关的参数见表2.3和表2.4。
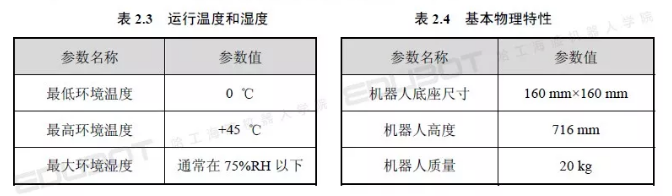
在安装机器人前,须确认安装尺寸。机器人基座上的孔距为138mm×138mm,如图2.24所示。

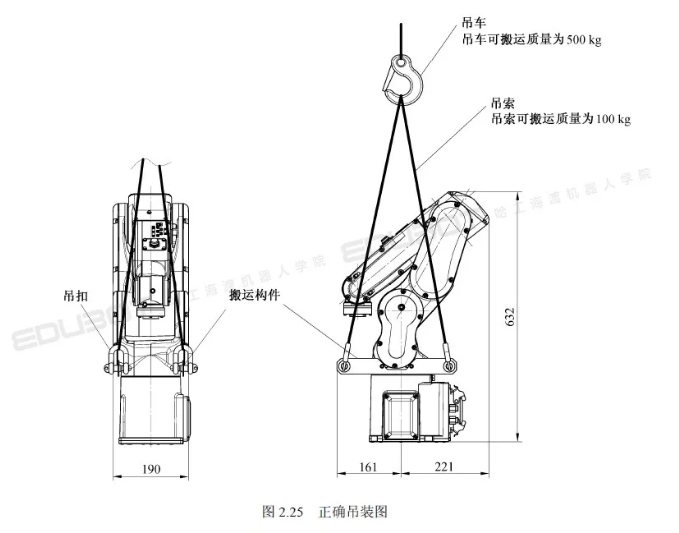
LRMate200iD/4S机器人的正确吊装姿态如图2.25所示。
机器人安装完成如图2.26所示。

注:必须按说明书操作。
机器人的质量为20kg,必须使用相应负载能力的起重配件。
在机器人固定到底座之前,不要改变机器人的姿态。
机器人固定必须牢固可靠。
安装时注意安全。
